视觉龙VDSR智能相机定位案例
- 时间:2017-06-09作者:深圳市视觉龙科技有限公司浏览:111
定位要求: 流程:运动平台抓取产品到达相机拍照点,VDSR通过以太网把产品的坐标值发送给外部设备,外部设备根据坐标值调整运动平台,把产品准确放到治具中。 精度:0.03mm 定位参数: 相机:130万 相机分辨率:1280*1024 视野:20mm*16mm 精度:20mm/1280pixel=0.0156mm/pixel<0.03mm 满足精度要求 相机标定: 通过两点标定,把图像畸变以及相机安装角度进行矫正, 相机由图像坐标系转换成世界坐标系。 定位模板制作: 提取产品的外轮廓作为模板 定位过程: 一:获取产品作模板时在相机坐标中的坐标值。 二:外部设备通过以太网发送指令触发VDSR拍照,然后VDSR通过以太网把当前产品在的角度值发送给外部设备,引导运动平台调整产品角度。 三:调整完产品角度后,外部设备通过以太网再发送指令触发VDSR拍照,VDSR通过以太网把当前产品在相机坐标中的坐标值发送给外部设备,外部设备计算出与模板位置的偏移量,引导运动平台运动
深圳市视觉龙科技有限公司专注于视觉系统,三维传感器,智能相机等
词条
词条说明
锂电池开路电压(ocv)检测概述: OCV全称(open circuit voltage)开路电压,OCV测试主要是通过连接在电压测试仪和内阻测试仪上的探针压在软包电池的正负极耳上测量电池特性,OCV测试是电池测试中比较重要的一环。电池在上料区被抓取后通过视觉纠偏工位,放在固定的测试点,机台测试工位使探针压在较耳上,在短时间内取得电池的精准数据,然后分拣机将测试过程中的不良品和良品分离并做下一步的
深圳市视觉龙科技有限公司 公司地址:深圳市龙华新区民清路光辉科技园(富士康西二门)2号楼2单元603 总机电话:0755-82721850/82545955/ 82545931/ 82545992 公司传真:0755-82545951 E-mail: gm@ 常州龙为智能科技有限公司 地址:中国.江苏省常州市新北区高新科技园15号楼创新科技楼A338室 电话:051
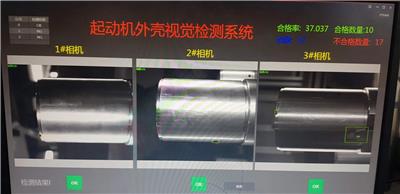
硬件配置: VDSR-130万+变倍远心镜头 检测要求:检测针脚是否穿过铁件并弯折,不良品**检出。 项目功能:通过视觉检测出不良品,机构将不良品从治具取出,管控前段自动穿线机的不良品流向后段。 https:///tencentvideo_v1/playerv3/TPout.swf?max_age=86400&v=20161117&vid=g0522minh08
VD200--太阳能硅片案例, 采用Adept机械手取片,在焊接生产线上放片, 运行的过程中完成纠偏。 纠偏流程节拍2.5s,精度±0.05mm. http:///player.php/sid/XMTM3NDMwOTQyOA==/v.swf
联系方式 联系我时,请告知来自八方资源网!
公司名: 深圳市视觉龙科技有限公司
联系人: 尹女士
电 话: 075582721850
手 机: 18033445254
微 信: 18033445254
地 址: 江苏常州新北区中国.深圳市龙华区民清路光辉科技园2栋2单元6楼
邮 编: 518300
相关推荐




相关阅读
1、本信息由八方资源网用户发布,八方资源网不介入任何交易过程,请自行甄别其真实性及合法性;
2、跟进信息之前,请仔细核验对方资质,所有预付定金或付款至个人账户的行为,均存在诈骗风险,请提高警惕!
- 联系方式
公司名: 深圳市视觉龙科技有限公司
联系人: 尹女士
手 机: 18033445254
电 话: 075582721850
地 址: 江苏常州新北区中国.深圳市龙华区民清路光辉科技园2栋2单元6楼
邮 编: 518300
- 相关企业
- 广东顺尚信光电科技有限公司
- 河北鹰眼智能科技有限公司
- 东莞敏威光电科技有限公司
- 北京盈美智科技发展有限公司
- 桐城市睿博特机器人技术有限公司
- 深圳市立新视觉技术有限公司
- 深圳市迪姆自动化有限公司
- 深圳市腾锐视觉有限公司
- 安徽与和电子科技有限公司
- 商家产品系列
- 产品推荐
- 资讯推荐


¥99997.00


¥250000.00


¥1.00