高创EtherCAT直线电机寻相处理过程
- 时间:2021-03-30作者:深圳市万里疆科技有限公司浏览:161
依据高创直线电机驱动器手册对寻相过程的解释和状态的表达,发现可以直接读取Phase Find Status的值 确定其是否寻相完成,然后进行策略应对。 高创原厂提供的寻相流程: 流程1(通用流程适合多数主站) 1.驱动器每次掉电再上电后,0x6041的bit7=1,表示驱动器有一个warning这个warning,需要驱动器首先被servo on,然后驱动器内部执行phasefind操作,phasefind成功之后,warning就会消除,0x6041的bit7才会变为0,表示寻相完成 ; 2.关于0x6060(MODE)的设置:建议ServoOn之前,切换0x6060为10(Cyclic sync torque mode),然后驱动器在这个MODE下进行phase find,phasefind成功完成,驱动器给出0x6041的bit7=0后,主站切换0x6060为8(注意:phase find过程中,actual position不会是零,是随着电流变化,位置是波动的) 经过测试发现此流程在部分高创驱动器中可用(主要是新固件[V.1.41以上]的驱动器),部分不可以用(主要是旧固件版本的驱动器),那是否有一种通用的处理无霍尔传感器直线电机寻相的流程呢。 自研流程:流程2(通用流程适合多数主站) 依据高创直线电机驱动器手册对寻相过程的解释和状态的表达,发现可以直接读取Phase Find Status的值 确定其是否寻相完成,然后进行策略应对。 下图是高创直线电机中的寻相相关的OD(Object Dictionary ),有这些数据,就可以开刀了。 高创直线电机数据列表.jpg 高创直线电机数据列表-1.jpg 建立初始测试流程如下: 1,使能后,不做任何操作 2,让其自动寻相, 3,读取寻相状态位是否与高创提供的一致 4,重新上使能 5,执行CSP运动 注意次上使能后,只可以读取PDO&SDO数据,不得做任何PTP操作,待寻相完成后,可以正常操作。 测试多个不同固件驱动器之后,发现方法可行。效率比流程1较少快1分钟! 较终流程为: 1,使能 2,通过SDO读取0X20A9.0(U16)中的值,然后等待其变为2 寻相完成(仅不带霍尔传感器驱动有效,或者带霍尔传感器但霍尔传感器是劣质品), 3,使能 4,执行CSP运动
深圳市万里疆科技有限公司专注于TOYO直线模组,微型电缸,螺杆滑台等
词条
词条说明
依据高创直线电机驱动器手册对寻相过程的解释和状态的表达,发现可以直接读取Phase Find Status的值 确定其是否寻相完成,然后进行策略应对。 高创原厂提供的寻相流程: 流程1(通用流程适合多数主站) 1.驱动器每次掉电再上电后,0x6041的bit7=1,表示驱动器有一个warning这个warning,需要驱动器首先被servo on,然后驱动器内部执行phasefind操作,phas
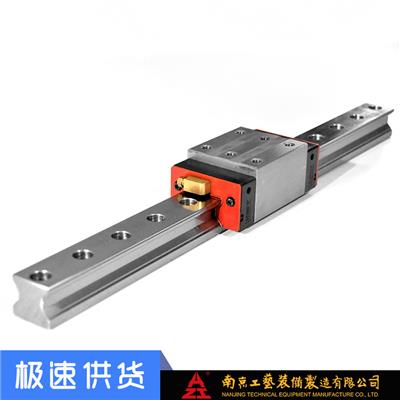
线性马达直线电机是一种直线运动的马达,可以设计成单轴、双轴或者龙门式结构,它的原理个永磁同步机相似,分为有铁芯、无铁芯和无槽式直线电机。(相关阅读可以查看万里疆官网《直线电机模组的6大特点》) 线性马达直线电机内部结构,首先它的内部构造由以下部件组成:直线导轨、工作台、拖链上接板、拖链、缓冲器、端板、直线电机、光电开关遮光板、侧盖板、上侧盖板、光电开关、拖链下接板、LMB钢带。下面介绍万里疆线性马
步进马达在日常生活中用途非常广,3c和工业方面都有它的声影,接下来万里疆就跟大家聊一聊步进马达的应用和及控制。 一、步进马达常见应用 3C产品 数位相机镜头、列表机、数位摄影机、光碟片读取头、自动对焦式的投影机等,步进马达在这些产品中,都被视为较关键的零组件。 工业以及医疗设备 常用X-Y平台、医疗仪器、机器人、自动检票机及提款机等场所,也可与螺杆、皮带等组合做直线运动控制,其优点如下 1、可利用
直线电机是指通过电磁感应定律实现电能转换或传递的一种电磁装置,在工业生产中有着十分重要的地位。有刷直线电机与无刷直线电机,都属于常用电机,其区别就在于结构内是否有碳刷,除此之外,两者还有很大的不同。 调速方式 有刷电机调速过程是通过调整供电电源电压的高低实现的。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。 无刷电机调速过程电机的供电
联系方式 联系我时,请告知来自八方资源网!
公司名: 深圳市万里疆科技有限公司
联系人: 邱子楠
电 话: 0755-23765312
手 机: 13828751645
微 信: 13828751645
地 址: 广东深圳龙华区华宁路40号港深创新园A栋525-532室
邮 编:
相关推荐








相关阅读
1、本信息由八方资源网用户发布,八方资源网不介入任何交易过程,请自行甄别其真实性及合法性;
2、跟进信息之前,请仔细核验对方资质,所有预付定金或付款至个人账户的行为,均存在诈骗风险,请提高警惕!
- 联系方式
公司名: 深圳市万里疆科技有限公司
联系人: 邱子楠
手 机: 13828751645
电 话: 0755-23765312
地 址: 广东深圳龙华区华宁路40号港深创新园A栋525-532室
邮 编:
- 相关企业
- 浙江成大传动设备有限公司
- 南京工艺装备制造股份有限公司
- 东莞市科士威传动科技有限公司
- 天津鼎锐特轴承贸易有限公司
- 青岛易科源传动科技有限公司
- 上海东篆智能科技有限公司
- 广东天功自动化科技有限公司
- 上海雷尼尔精密机械有限公司
- 佛山元普机电实业有限公司
- 广州亿卓精密机械有限公司
- 商家产品系列
- 产品推荐
- 资讯推荐




¥5800.00




¥1200.00













