
技术聚焦:侧扫声呐深度剖析
- 时间:2022-05-27作者:上海瑾瑜科学仪器有限公司浏览:504
上海瑾瑜科学仪器有限公司专注于侧扫声呐,多普勒流速剖面仪,声学释放器,水听器,图像声呐,温盐深仪CTD等
词条
词条说明
LG Sonic 的MPC-Buoy超声波除藻系统在水库中的应用案例
LG Sonic 的MPC-Buoy超声波除藻系统在水库中的应用案例 LG Sonic 的超声波系统E-line系列,Industrial系列,MPC-Buoy浮标系统已在西班牙拉科鲁尼亚的 Sabon 水库实施,作为控制藻类生长的解决方案,从而确保水质并减少化学品的使用。藻类控制解决方案供应商 LG Sonic 较近在西班牙拉科鲁尼亚的 Sabon 水库推出了MPC-Buo
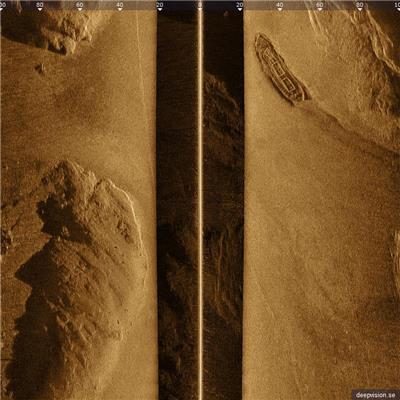
LE340是一款高性能、低价格侧扫声呐,系统结构紧凑、操作简单,图像清晰;用于水下综合科考、沉船探测、水下植物分布调查、海底地形地貌研究、湖泊海洋测绘、海道测量、考古调查、搜救和紧急救援等.Deepvision侧扫声呐系统包括拖鱼,甲板单元,电缆和软件。 系统可生成高质量水底图像,如下图所示,适用于各种海底应用和研究。DeepVision侧扫声呐特点:· 优异的图像质量;· 易
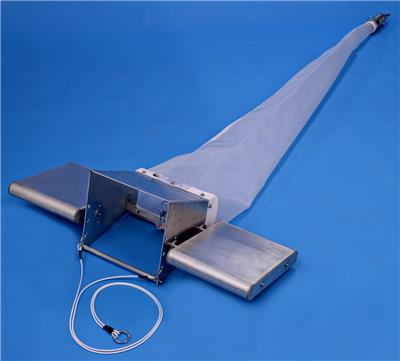
DeepCatASV传感器平台 DeepCat是一种自动传感器数据采集平台,它不仅是水上航行器,而且是一个全面的系统。它是一个高度便携的双体船,根据不同任务和工作区域都可以方便携带使用。因其小尺寸造型,可以在水体不同区域布放,可以根据设置的任务规划自主航行并自动返回,也可通通过RC控制随时**于任务规划人工控制无人船。 主要特征:l 自主性l 灵活性l&nb
声呐(Sound Navigation And Ranging,英文缩写“SONAR”),全称为声音导航与测距,是一种利用声波在水下的传播特性,通过电声转换和信息处理,完成水下探测和通讯任务的电子设备。 它有主动式和被动式两种类型,属于声学定位的范畴。中文名声呐外文名sonar范畴声学定位类型主动式、被动式中文全称声音导航与测距基本简介作为一种 声学探测设备,主动式声呐是在英国首先投入使用的,不过
联系方式 联系我时,请告知来自八方资源网!
公司名: 上海瑾瑜科学仪器有限公司
联系人: 何经理
电 话: 021-36320539
手 机: 13818344948
微 信: 13818344948
地 址: 上海浦东康桥上海市浦东新区康花路499号中天科技园东园3号楼3-308、309室
邮 编:
网 址: generule.b2b168.com
相关推荐







相关阅读
1、本信息由八方资源网用户发布,八方资源网不介入任何交易过程,请自行甄别其真实性及合法性;
2、跟进信息之前,请仔细核验对方资质,所有预付定金或付款至个人账户的行为,均存在诈骗风险,请提高警惕!
- 联系方式
公司名: 上海瑾瑜科学仪器有限公司
联系人: 何经理
手 机: 13818344948
电 话: 021-36320539
地 址: 上海浦东康桥上海市浦东新区康花路499号中天科技园东园3号楼3-308、309室
邮 编:
网 址: generule.b2b168.com
- 相关企业
- 广西中海达仪器设备有限公司
- 杭州海蛟科技有限公司
- 湖北海派海洋科技发展有限公司
- 天津智汇海洋科技有限公司
- 天津海之星海洋科技发展有限公司
- 上海国海物业公司
- 青岛连城创新技术开发服务有限责任公司
- 青岛金盛辉海洋仪器有限公司
- 青岛欧仕海洋仪器有限公司
- 商家产品系列
- bod快速测定仪
- cod检测仪器
- gps传感器
- ic集成电路
- lcr测试仪
- led测试仪
- 低温冰箱
- 滴定管
- 滴定仪
- 地磅
- 地上衡
- 点温计
- 电磁学计量仪器
- 电导率传感器
- 电导率仪
- 电导仪器
- 电动车仪表
- 电感器
- 电极
- 电力传感器
- 电量变送器
- 电流互感器
- 电能质量分析仪
- 电桥
- 电容式变送器
- 电容物位计
- 电位器
- 电压表
- 电压互感器
- 电源IC
- 产品推荐
- 资讯推荐
¥1.00

¥12231.00


¥10000.00

¥100000.00


¥900.00




¥11.00










