弧焊用机器人的基本功能
- 时间:2021-12-04作者:深圳市欣东港贸易有限公司浏览:272
弧焊用机器人的基本功能
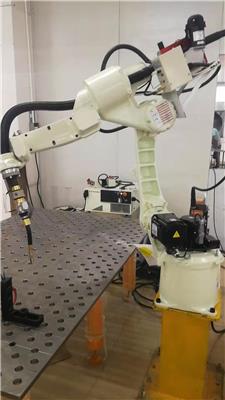
弧焊过程比点焊过程要复杂得多,工具中心点(TCP),也就是焊丝端头的运动轨迹、焊枪姿态、焊接参数都要求精确控制。所以,弧焊用机器人除了前面所述的一般功能外,还必须具备一些适合弧焊要求的功能。
虽然从理论上讲,有5个轴的机器人就可以用于电弧焊,但是对复杂形状的焊缝,用5个轴的机器人会有困难。因此,除非焊缝比较简单,否则应尽量选用6轴机器人。
弧焊机器人除在作“之”字形拐角焊或小直径圆焊缝焊接时,其轨迹应能贴近示教的轨迹之外,还应具备不同摆动样式的软件功能,供编程时选用,以便作摆动焊,而且摆动在每一周期中的停顿点处,机器人也应自动停止向前运动,以满足工艺要求。此外,还应有接触寻位、自动寻找焊缝起点位置、电弧跟踪及自动再引弧功能等。
上述就是为你介绍的有关弧焊用机器人的基本功能的内容,对此你还有什么不了解的,欢迎前来咨询我们网站,我们会有专业的人士为你讲解。
深圳市欣东港贸易有限公司专注于焊接机械手,机器人焊机,机械手焊机,激光自动化焊接,全自动焊接设备,折弯自动化等
词条
词条说明
我公司因为业务需要特别招聘业务员数名。要求如下1**器人方面的从业历史。 &nb
焊接机器人的分类: 焊接机器人的分类:(1)点焊机器人(2) 弧焊机器人点焊对所用的机器人的要求都比较低。因为点焊只需点位掌握,至于焊钳在点与点之间的移动路径没有严格技术要求。这也是焊接机器人较早只能用来点焊的原因。点焊用机器人不仅要有足够的负重能力,而且在点与点之间移位时速度要迅速,过程要平稳
弧焊用机器人的基本功能弧焊过程比点焊过程要复杂得多,工具中心点(TCP),也就是焊丝端头的运动轨迹、焊枪姿态、焊接参数都要求精确控制。所以,弧焊用机器人除了前面所述的一般功能外,还必须具备一些适合弧焊要求的功能。虽然从理论上讲,有5个轴的机器人就可以用于电弧焊,但是对复杂形状的焊缝,用5个轴的机器人会有困难。因此,除非焊缝比较简单,否则应尽量选用6轴机器人。弧焊机器人除在作“之”字形拐角焊或小直径
1、灵活多样的焊锡方式,同时支持点焊和拖焊(拉焊),自动化焊锡设备全部工艺参数可由客户自行设置,以适应各种高难度焊锡作业和微焊锡工艺,全部焊锡参数可以伴随焊点坐标程序读取和保存,实现焊锡作业的柔性化。2、烙铁组件可以任意角度、任意方位调节,控制烙铁组的R轴,可以360度自由旋转,可以根据不同的焊盘和元器件任意设置送锡次数、预热时间和焊锡时间,实现一板多种焊点的复杂焊接工艺,实现焊锡作业的多样化。3
联系方式 联系我时,请告知来自八方资源网!
公司名: 深圳市欣东港贸易有限公司
联系人: 邢浩
电 话:
手 机: 13600153503
微 信: 13600153503
地 址: 广东深圳光明区光明新区
邮 编:
网 址: vav518.cn.b2b168.com
相关推荐






相关阅读
1、本信息由八方资源网用户发布,八方资源网不介入任何交易过程,请自行甄别其真实性及合法性;
2、跟进信息之前,请仔细核验对方资质,所有预付定金或付款至个人账户的行为,均存在诈骗风险,请提高警惕!
- 联系方式
- 相关企业
- 上海元源懿管道科技有限公司
- 友君欧比欧(厦门)机械设备有限公司
- 安徽雷奥机电设备有限公司
- 天津名匠智能制造有限公司
- 东莞市科思达智能装备有限公司
- 徐州硕博电子科技有限公司
- 宁波晶成机械制造有限公司
- 苏州市固士达精密机械有限公司
- 浙江和利氢能科技股份有限公司
- 泰安市瑞高机电设备有限公司
- 商家产品系列
- 产品推荐
- 资讯推荐

¥400000.00






¥90000.00


¥4780.00













